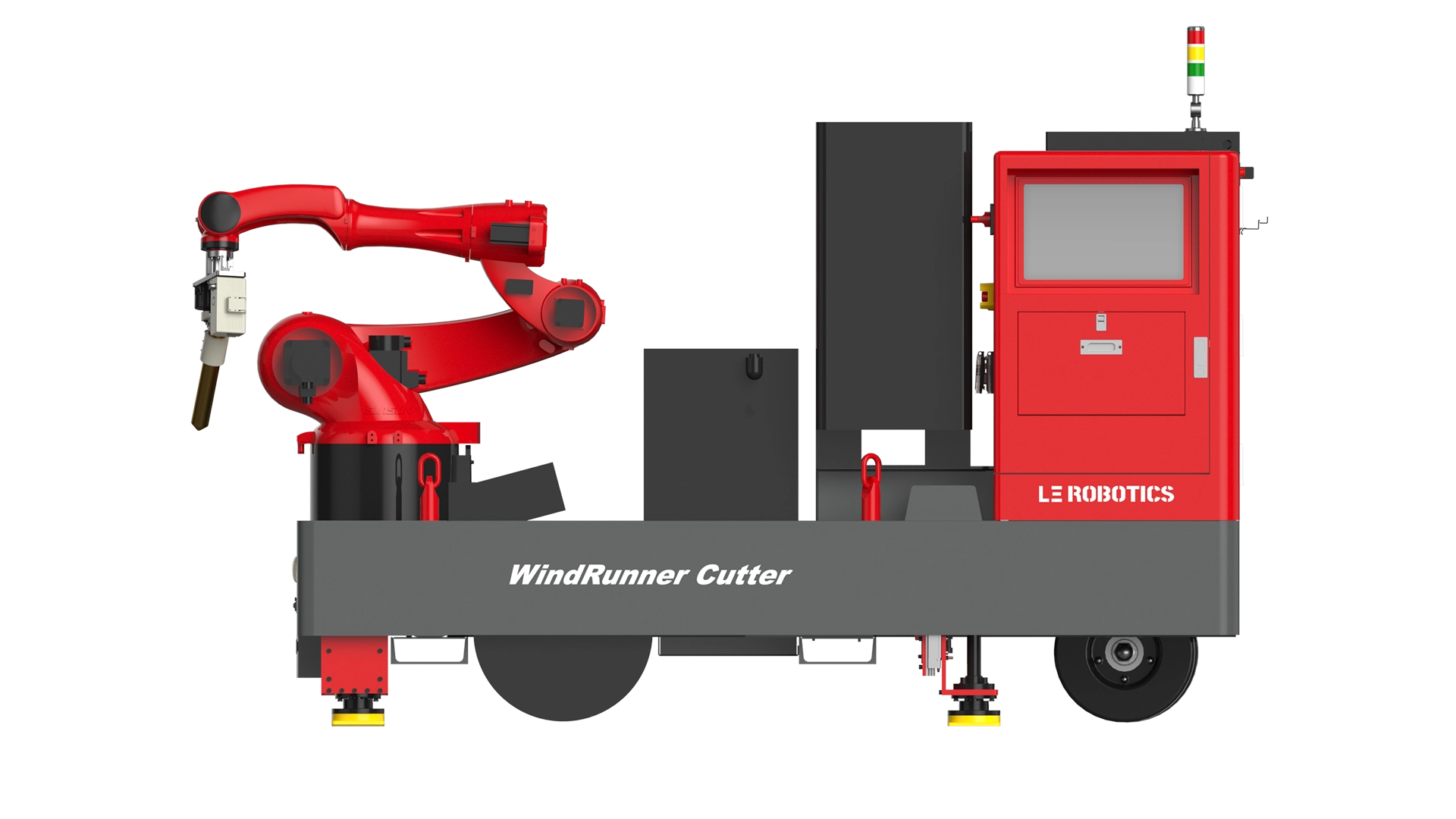
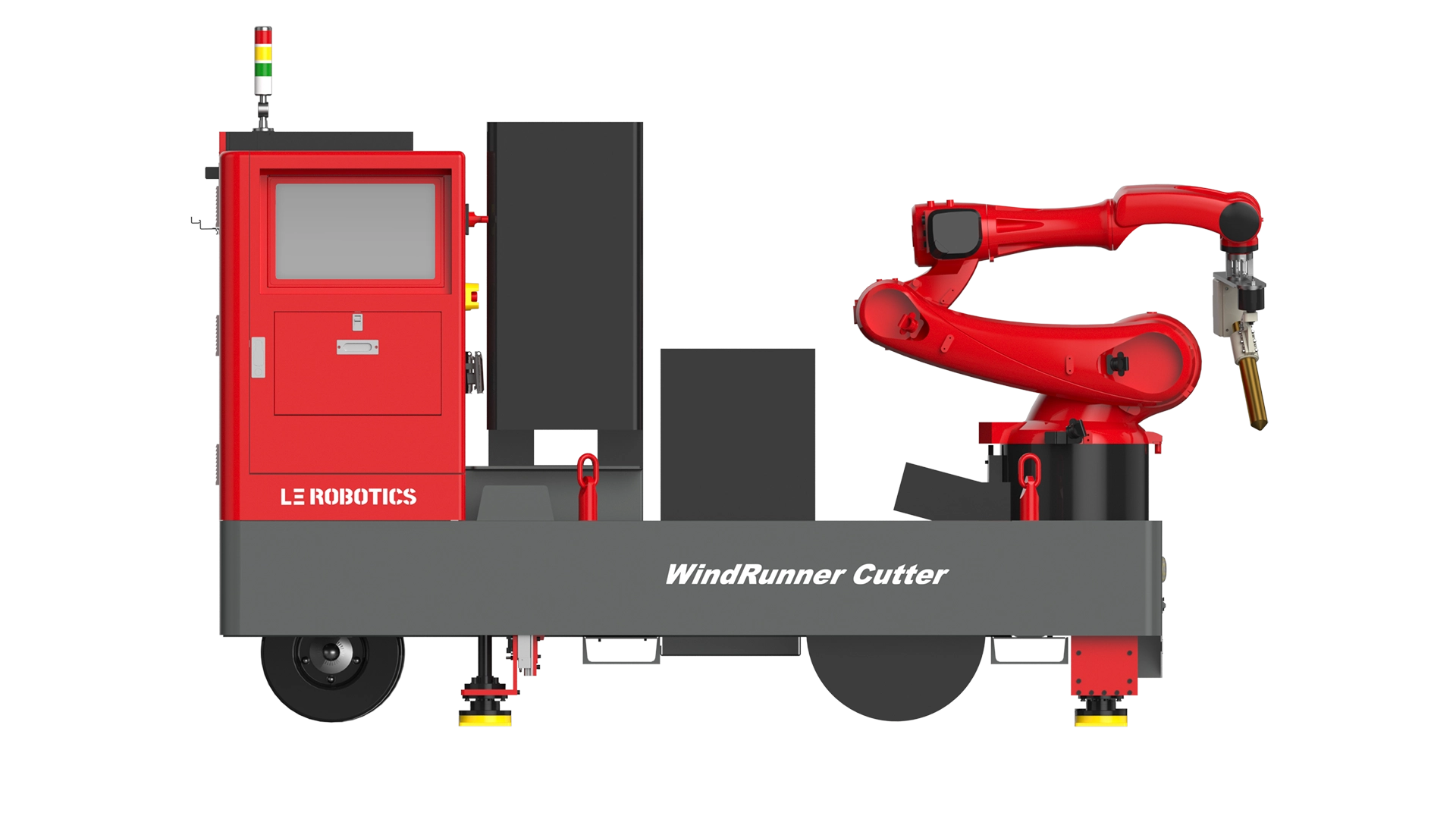
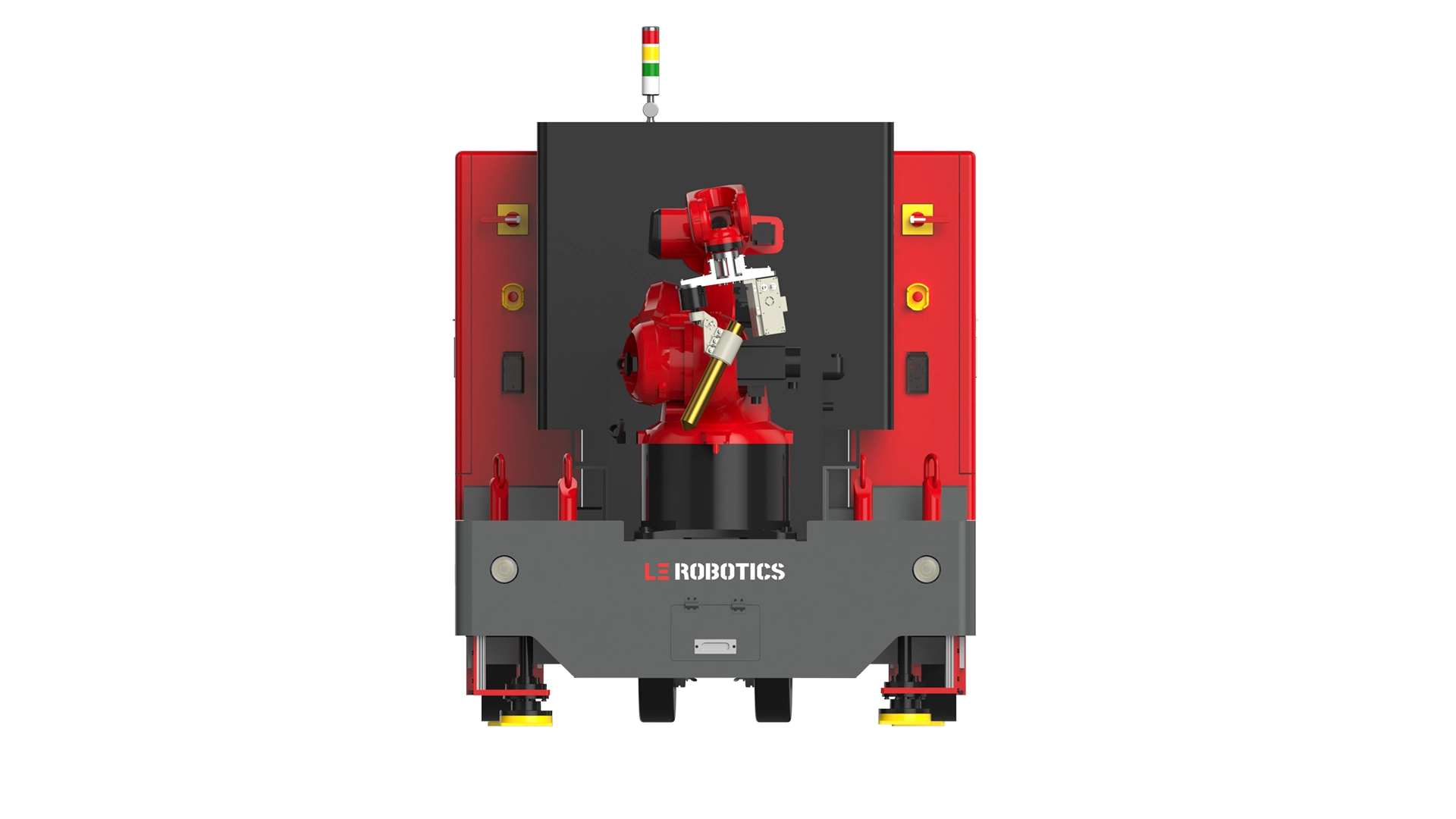
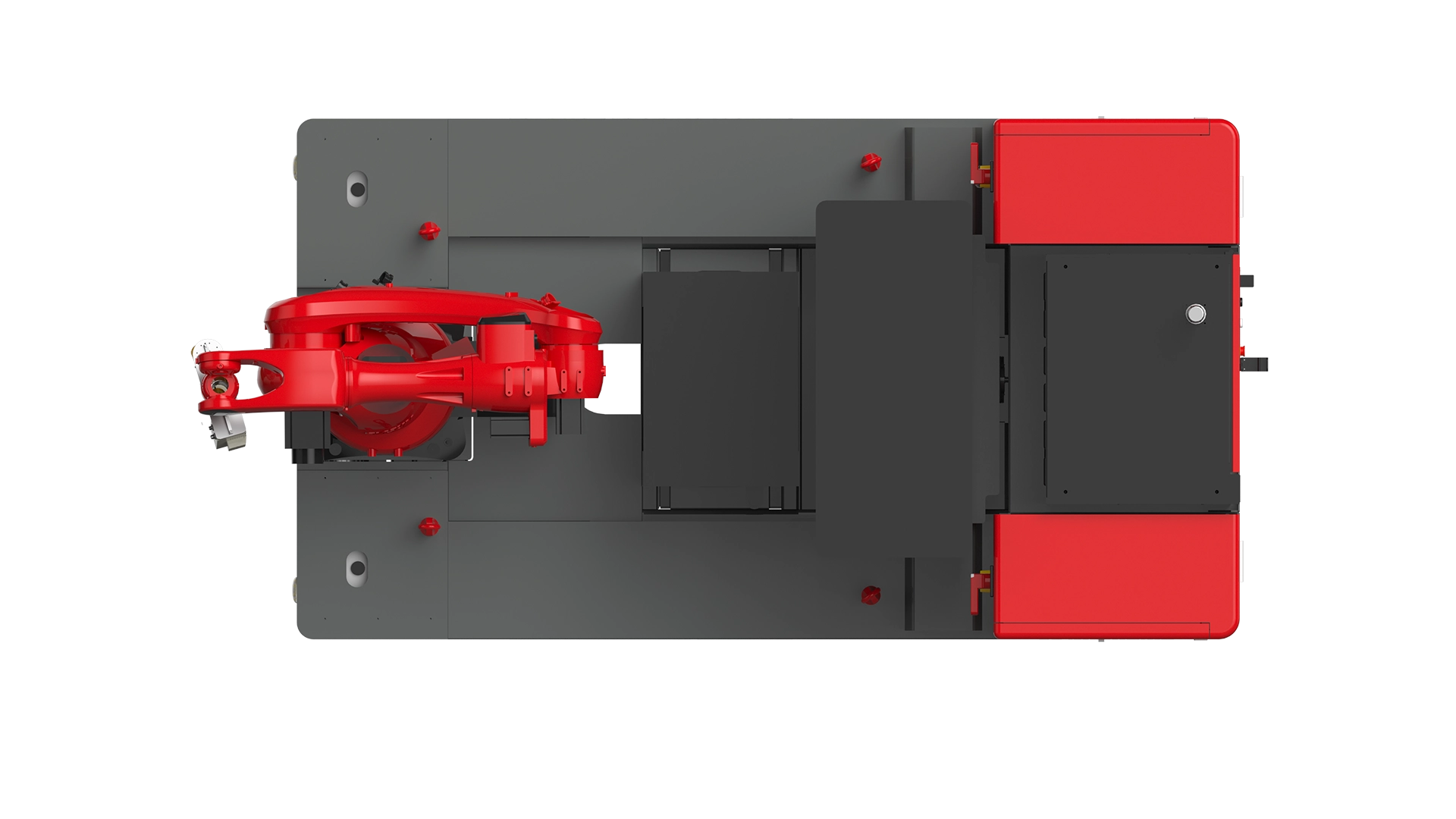
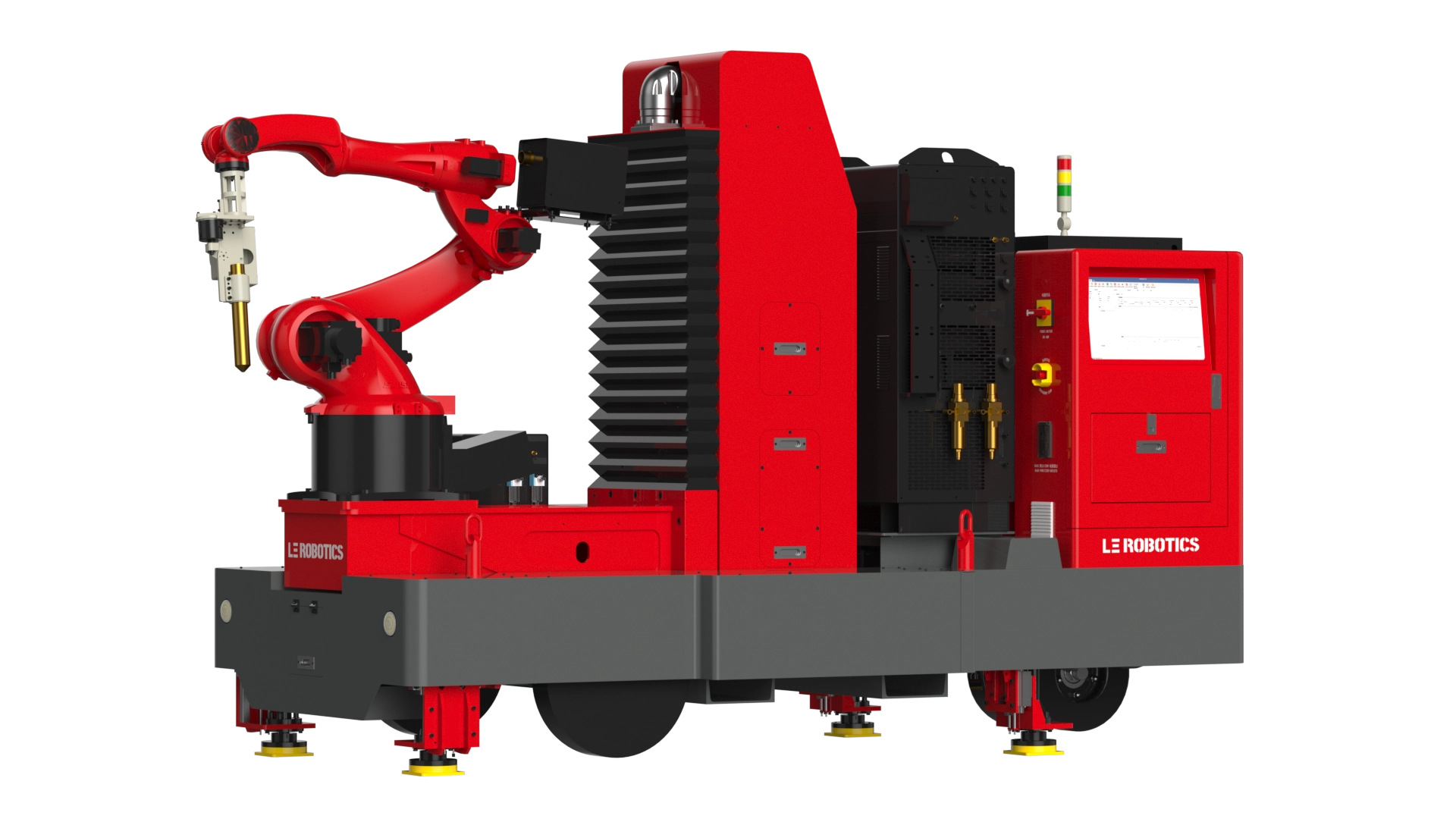
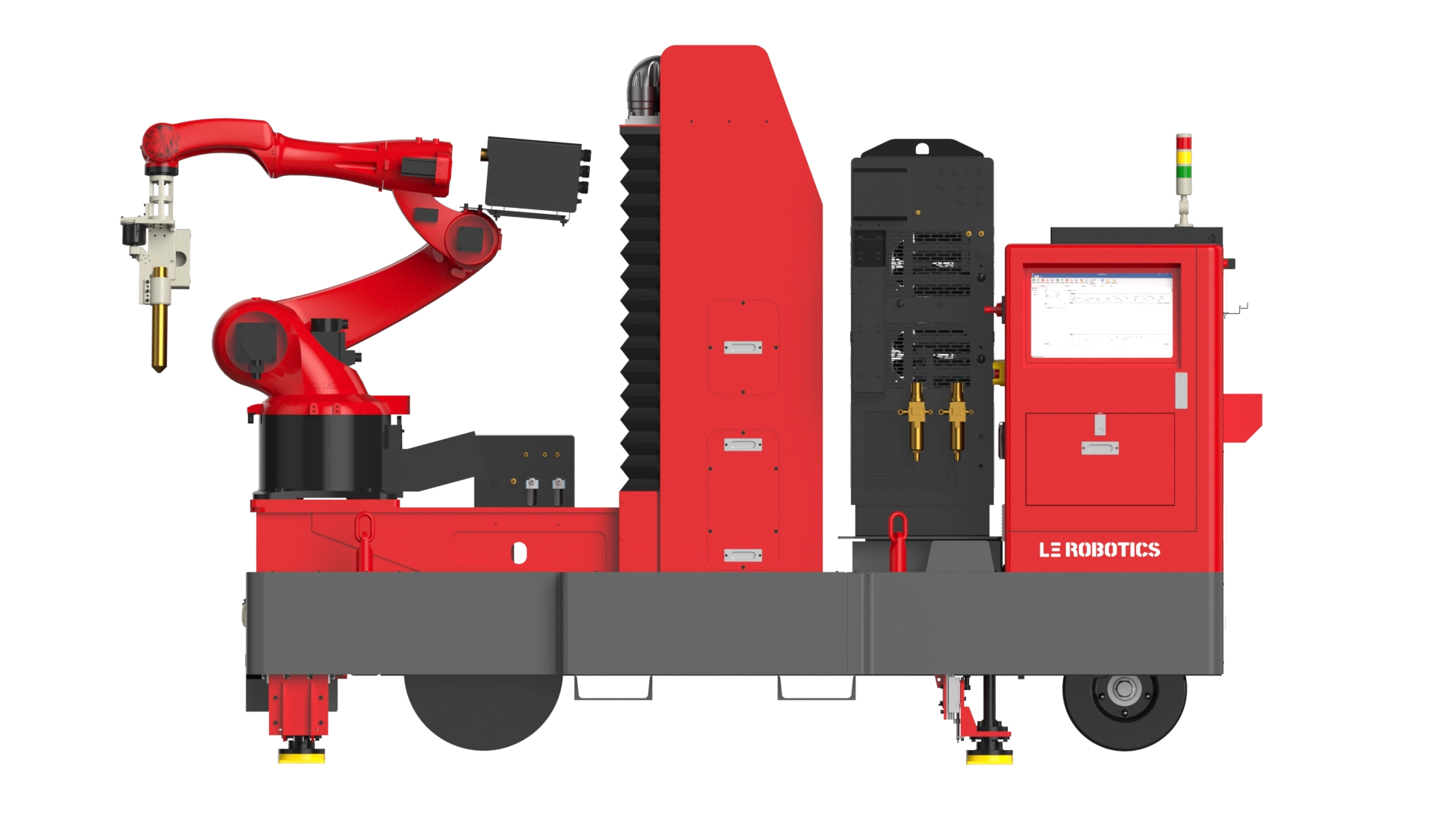
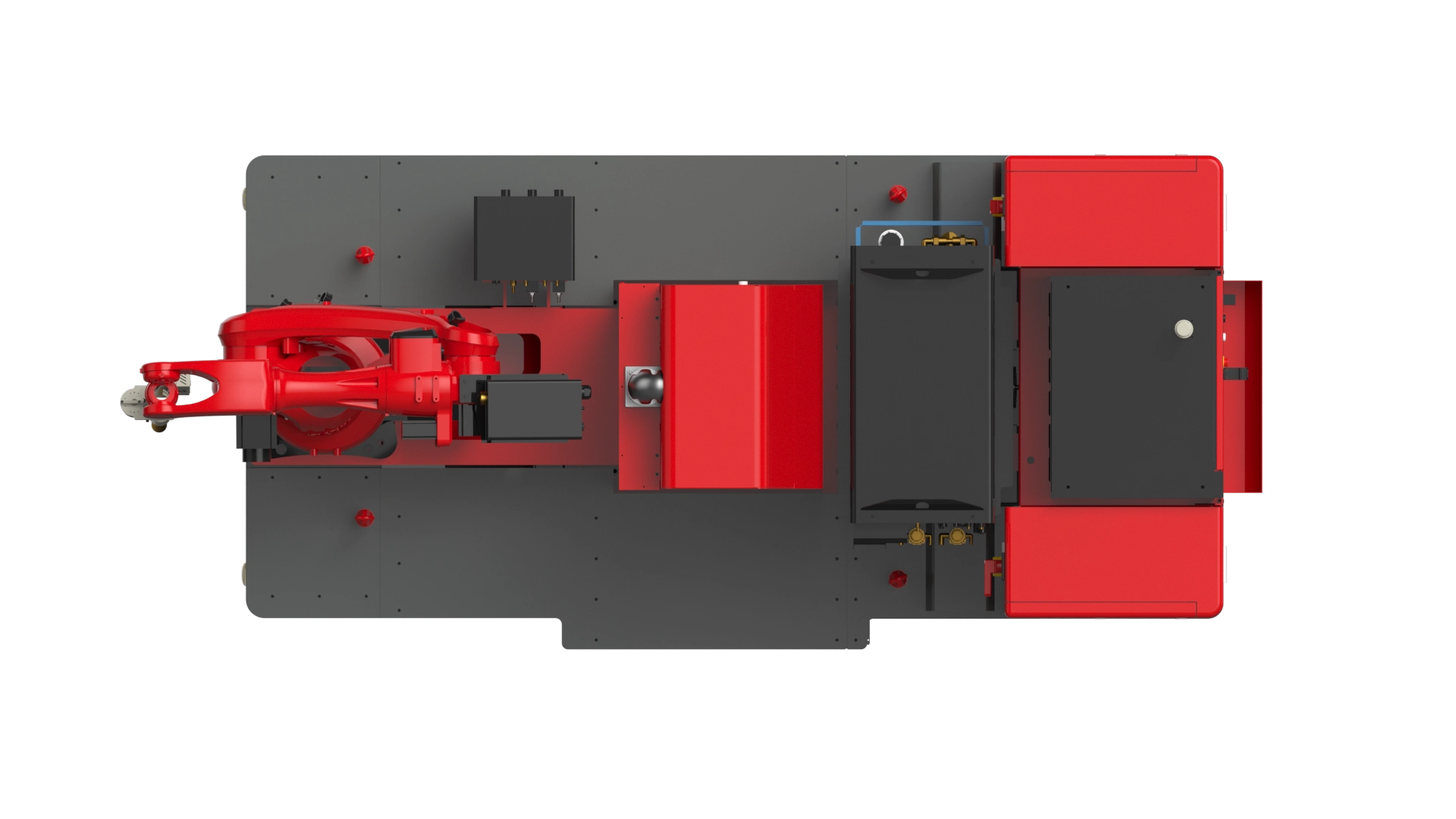
Portable collaborative robot, with its compact size, it becomes an ideal tool for welding in confined spaces. The welder is equipped with a wheel hub motor power system for flexible movement. 3D vision technology, wireless remote control driving technology, etc., no programming or teaching required, and comes pre-installed with a variety of welding programs that can automatically generate precise paths and welding postures. With its excellent cost-performance ratio, the CompactPro Welder is a preferred equipment for enterprises to improve manufacturing efficiency and reduce labor costs.









97KVA
Three-Phase Five-WVire System 3x380V+10%50Hz
Quick-connect power supply
100~6000mm/min
Depends on the Plasma Power Supply
2300kg (Slight Differences in Selection)
2800mmx1480mmx1690mm
≤0.5mm
2000 Frames/Second
RX01
48V
73ah
DC48V
Three-wheel drive
2010mm(Slight Differences in Selection)
Wireless remote control
4km/h
/
0'C to +45°C(Operating)
-20°C to +60'C (Tansport and Storage)
≤90% RH (Non-Condensing)



100KVA
Three-Phase Five-WVire System 3x380V+10%50Hz
Quick-connect power supply
100~6000mm/min
Depends on the Plasma Power Supply
3500kg (Slight Differences in Selection)
3200mmx1600mmx2300mm
≤0.5mm
2000 Frames/Second
RX01
48V
73ah
DC48V
Three-wheel drive
2010mm(Slight Differences in Selection)
Wireless remote control
4km/h
/
0'C to +45°C(Operating); -20°C to +60'C (Tansport and Storage)
≤90% RH (Non-Condensing)

Workpieces can be placed randomly without the need for jig positioning. Users can also equip their own rolling frames to facilitate cutting of tanks or cylinders in different orientations.

Powered by a battery, with wireless remote control driving, it is highly mobile. Low requirement for ground flatness, suitable for workshop operations. The range of arm span lifting is expanded, suitable for cutting holes and beveling on large tanks.

It can independently scan the workpiece model, determine the starting point, intermediate points, and end point based on affixed QR codes, reference points, or manual selection, and synthesize the control points into a smooth curve to generate a cutting path, controlling the robot to cut a trajectory with smooth edges.

Contact














