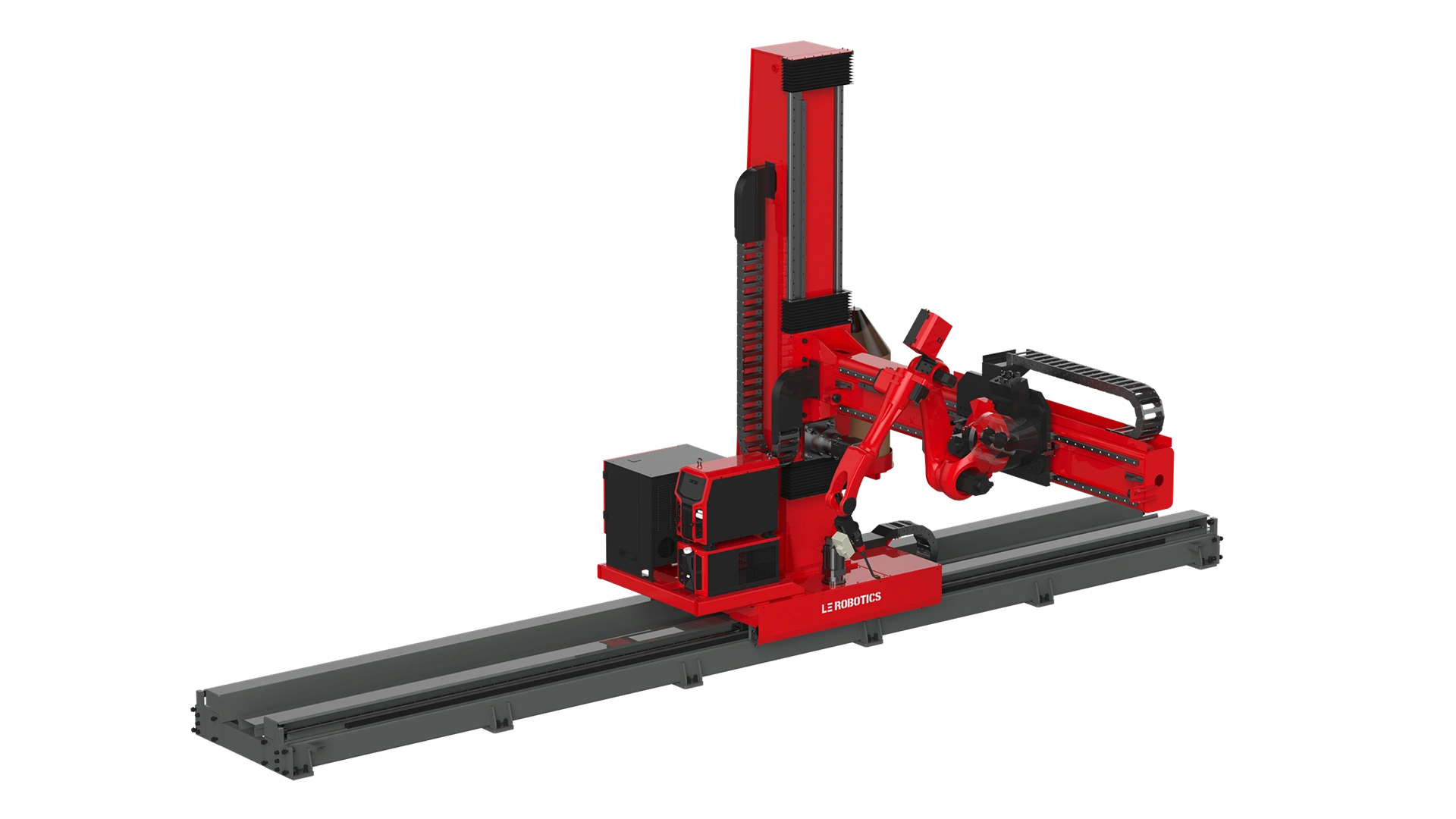
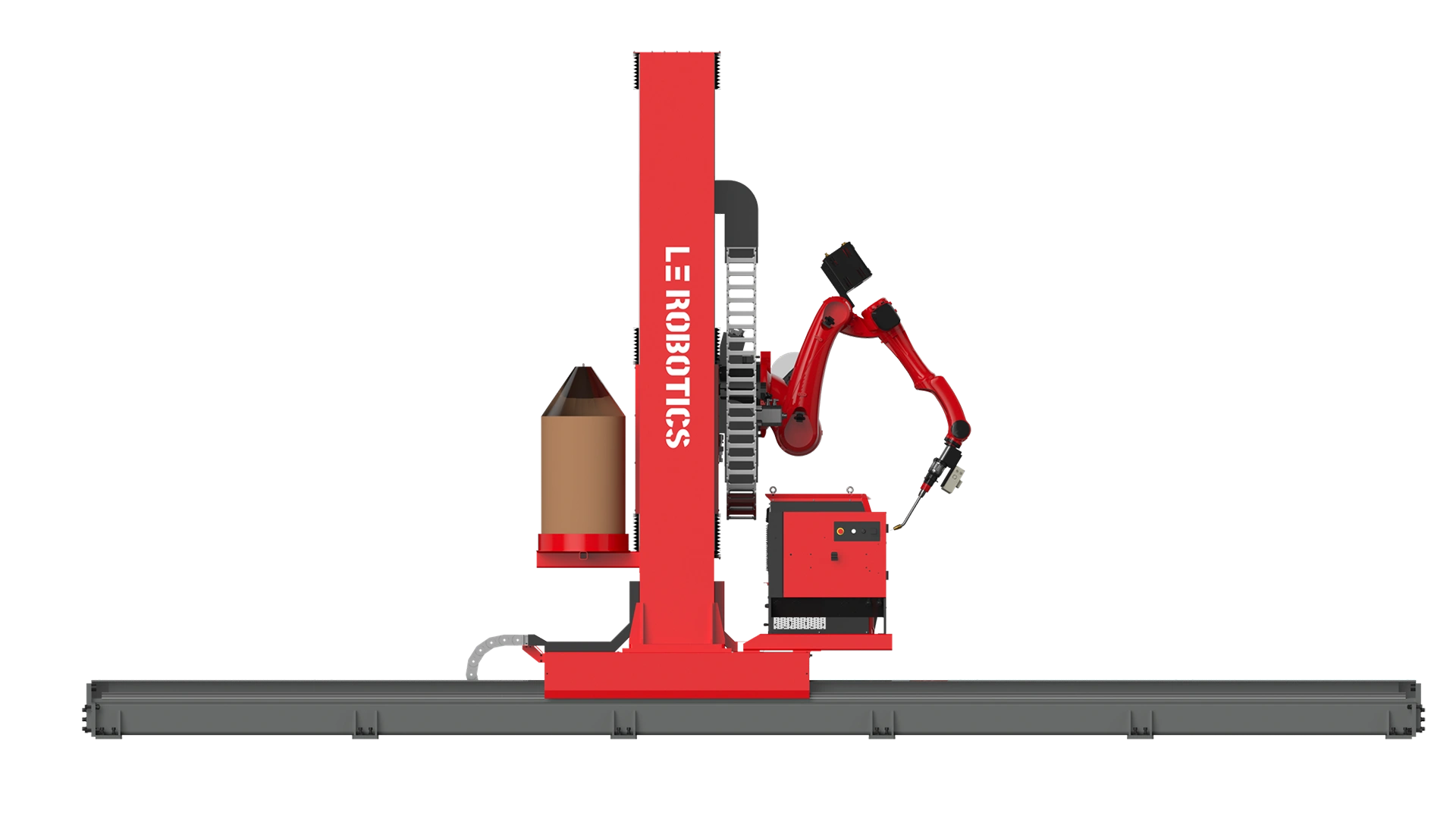
Suitable for welding long workpieces with larger cross-sections, but the width of the workpiece should not be too large, such as H-beam and derrick plates.
1. Depending on the diferent conditions of the workpiece, there are multiple degrees of freedom availablefor selection;
2.Multiple external axes provide a larger motion space for the robot, and when equipped with a positioningmachine, it can achieve multi-position welding such as flat, vertical, and ship-shape, ensuring the consistency of welding quality.



| Content | Main Technical Parameters and Range | Note | ||
|---|---|---|---|---|
| 7 Axes | 8 Axes | 9 Axes | ||
| Degrees of Freedom | 7Axes | 8 Axes | 9 Axes | |
| Overall Machine Power | 31kw | 33 kw | 3 6kw | |
| Maximum End Effector Load | 12kg | |||
| Operational Power Supply | Three-Phase Five-Wire System 3x380V+10950Hz | |||
| Visual Accuracy | / | ≤0.5mm | ≤0.5mm | |
| Scanning Frame Rate | / | 2000 Frames/Second | 2000 Frames/Second | |
| Robot Amm Extension Range | R=1465mm | Depends on the robot model chosen | ||
| Track Length | 6m/8m/12m/14m/16m | Selected based on the workpiece condition | ||
| Track X-Axis Movement Speed | ≥20m/min | Determined by design | ||
| Cantilever Y-Axis Movement Speed | / | ≥12m/min | ≥12m/min | Y-Axis travel designed based on the workpiece condition" |
| Column Z-Axis Movement Speed | / | / | ≥8m/min | Z-Axis travel designed based on the workpiece condition |
| AmbientTemperature | 0'C to +45°C(Operating); -20'C to +60'C (Transport and Storage) | |||
| Relative Humidity | ≤90% RH (Non-Condensing) | |||

Contact














