

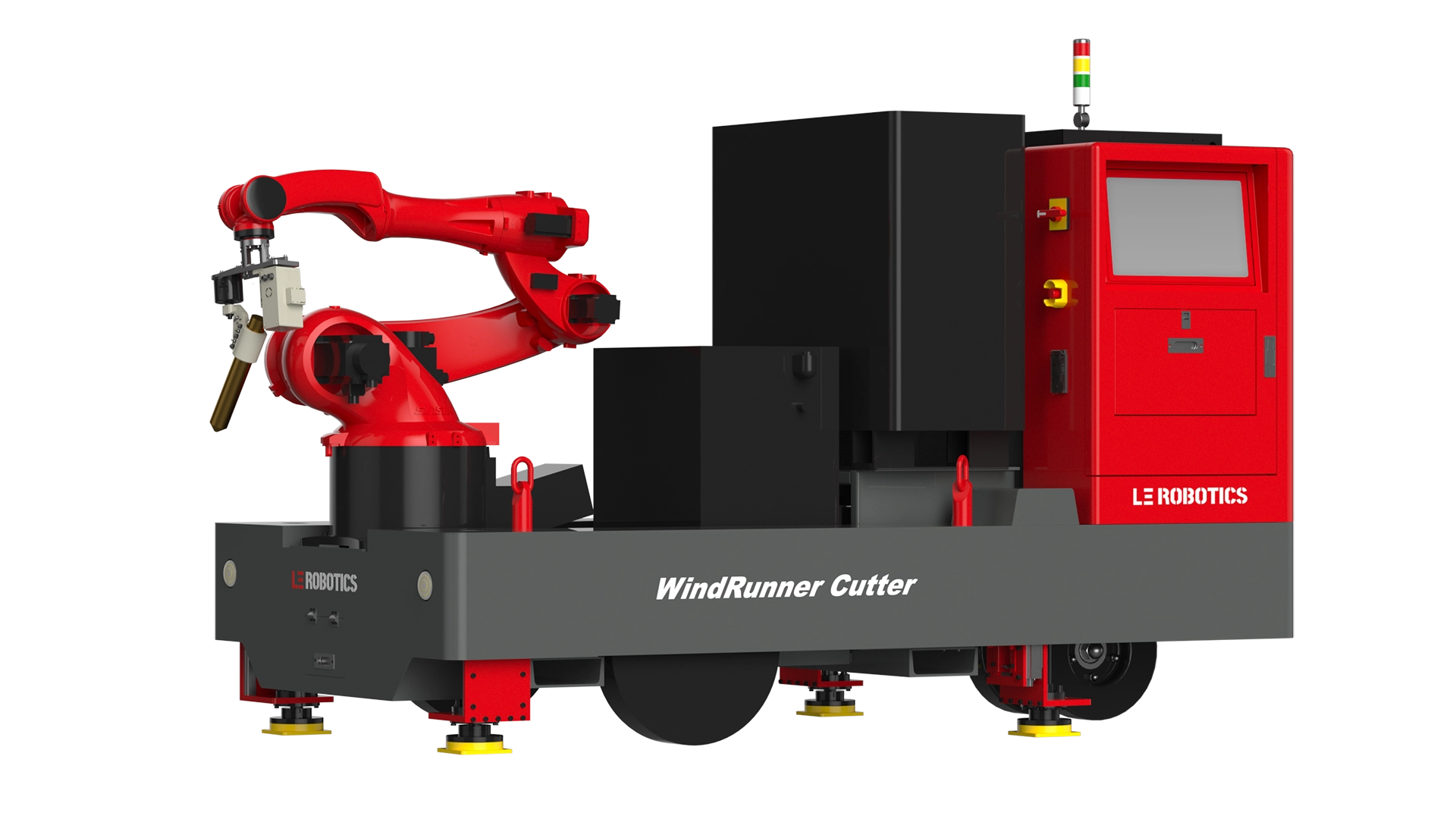
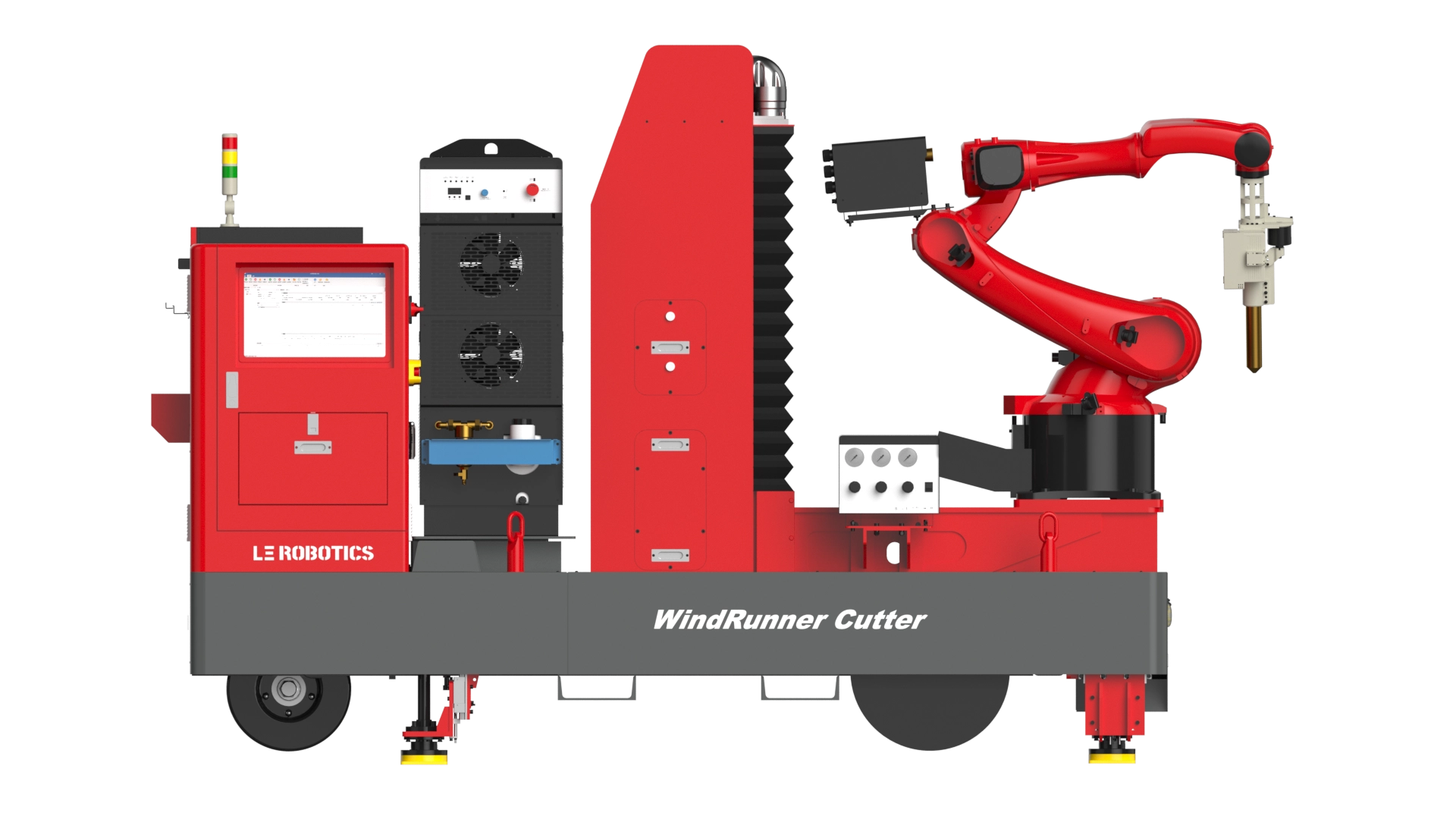
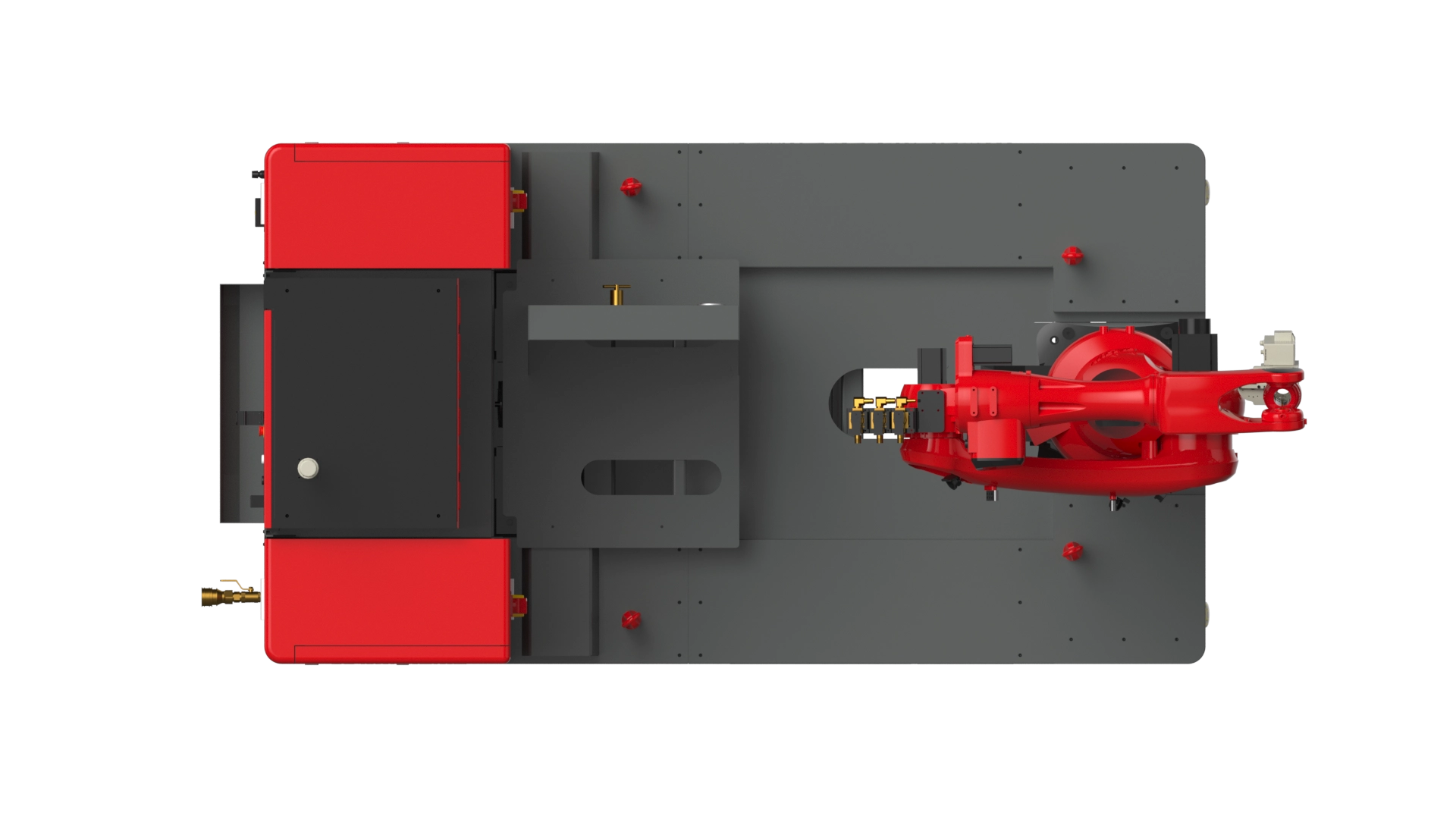
搭载差速桥动力系统,双轮转向。3D视觉技术、无线遥控行驶技术等,免编程、免示教,自主规划并确定切割路径,可实现各种空间曲线的切割轨迹。它的使用不仅提高了生产效率和切割质量,还降低了工人的劳动强度。可选配等离子切割或火焰切割。










97KVA
三相五线制 3x380v士10%/50Hz
快插供电
100~6000mm/min
视等离子电源而定
2300kg(选型不同而约有差异)
2800mmx1480mmx1690mm
≤0.5mm
2000帧/秒
RX01
48V
73ah
DC48V
三轮式
2010mm(选配不同型号而约有差异)
无线遥控
4km/h
/
0°C~+45℃(运转时);-20℃~+60℃(运输保管时)
≤90%RH(无冷凝)




100KVA
三相五线制 3x380v士10%/50Hz
快插供电
100~6000mm/min
视等离子电源而定
3500kg(选型不同而约有差异)
3200mmx1600mmx2300mm
≤0.5mm
2000帧/秒
RX01
48V
73ah
DC48V
三轮式
2010mm(选配不同型号而约有差异)
无线遥控
4km/h
1000mm
0°C~+45℃(运转时);-20℃~+60℃(运输保管时)
≤90%RH(无冷凝)





100KVA
三相五线制 3x380v士10%/50Hz
快插供电
50~750mm/min
6~150mm(标配常规割炬)
3500kg(选型不同而约有差异)
3200mmx1600mmx2300mm
≤0.5mm
2000帧/秒
RX01
48V
73ah
DC48V
三轮式
2010mm(选配不同型号而约有差异)
无线遥控
4km/h
1000mm
0°C~+45℃(运转时);-20℃~+60℃(运输保管时)
≤90%RH(无冷凝)

工件随意摆放,无需工装定位。用户也可配上自购的滚轮架,可方便罐体或筒体不同方位的切割。

动力电池,无线遥控行驶,移动灵活。
对地面平整度要求低,适合车间作业。
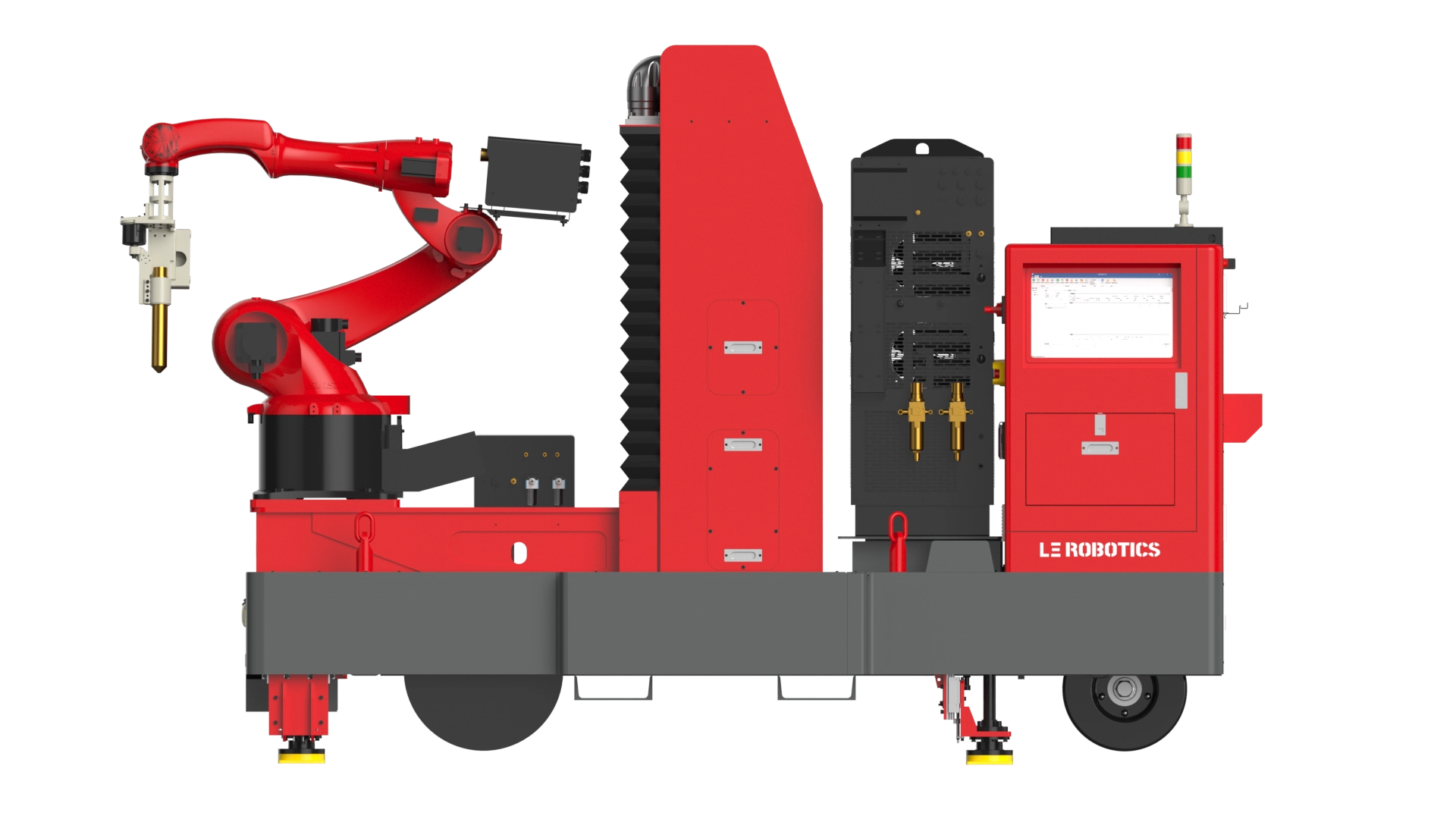
臂展升降范围扩大,适合大型罐体的割孔及开坡口。

自主扫描工件模型,可根据张贴的二维码、标记点等,或通过人工选点,确定切割起点、中间点、终点,并将控制点拟合成光顺的曲线以生成切割路径,控制机器人切割出轨迹流畅的割口。

在线咨询









